




Handhabungssysteme
für die Vollautomatisierung von Prozessen
Die Handhabungstechnik bezeichnet materielle Mittel oder Geräte, die den Materialfluss von einer zur anderen Stelle bewältigen.
Roboter werden in der Automatisierungstechnik dazu verwendet um einen Montage- und/oder Prüfprozess vollständig zu automatisieren. Hierzu werden auch Be- und Entlademagazine eingesetzt, um einen Teilepuffer vorhalten zu können.
»Fasse die Dinge an, wo sie tragbar sind.«
- Epiktet (50 – 138 n. Chr.)
Portalachsroboter
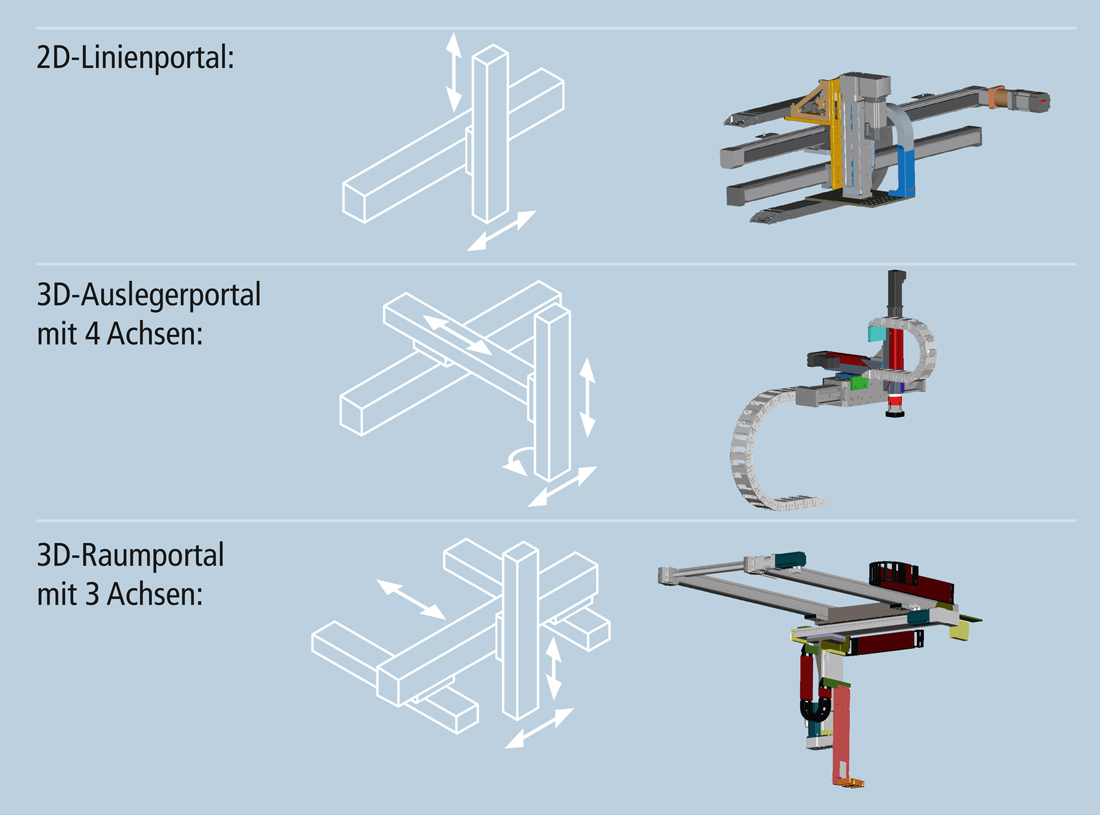
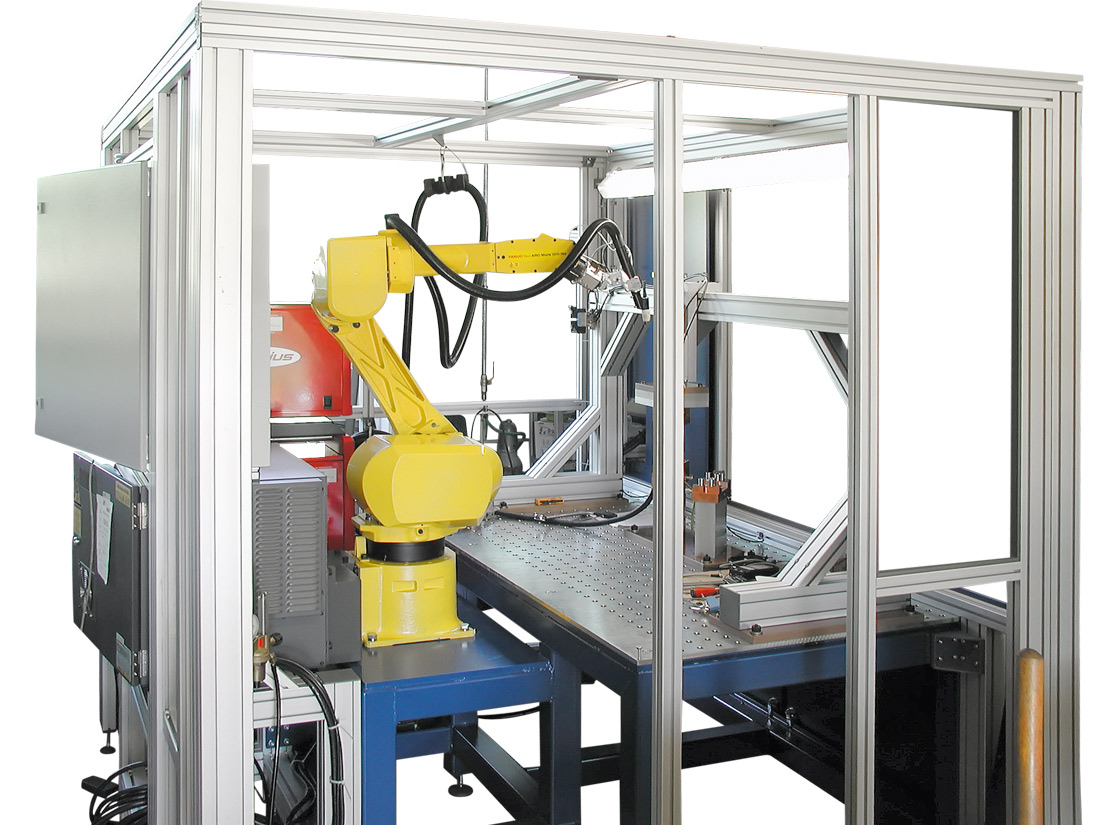
Gelenkarmroboter gibt es zum Beispiel als 5- und 6-Achs-Roboter mit 5 bzw. 6 Rotationsachsen.
← WIG-Schweißautomat unter Verwendung eines 6-Achs-Roboters.

← Bei diesem vollautomatischen Montageprozess wird mittels zwei Sortiertöpfen und einem Teilebunker sowie einem 2D-Linienportal mit pneumatischem Greifer der Injektor in das Düsengehäuse montiert.
Zwei 3D-Auslegerportale
mit jeweils 5 Achsen.
Die X-Y-Z-Achse wird ergänzt durch eine Drehachse an der eine weitere Linearachse angeflanscht ist. →

2D-Linienportal mit pneumatischem Doppelgreifer. →

 Deutsch
Deutsch English
English